Modulacja to nieliniowy proces elektryczny, w którym parametry jednego sygnału (nośnego) są zmieniane przez inny sygnał (modulujący, informacyjny). W inżynierii komunikacyjnej powszechnie stosuje się modulację częstotliwości, amplitudy i fazy. W energoelektronice i technologii mikroprocesorowej modulacja szerokości impulsu staje się coraz bardziej powszechna.
Spis treści
Co to jest PWM (modulacja szerokości impulsu)?
W przypadku modulacji szerokości impulsu amplituda, częstotliwość i faza oryginalnego sygnału pozostają niezmienione. Na czas trwania (szerokość) impulsu kwadratowego ma wpływ sygnał informacyjny. W angielskiej literaturze technicznej jest ona oznaczana skrótem PWM - pulse-width modulation (modulacja szerokości impulsu).
Zasada działania PWM
Sygnał z modulacją szerokości impulsu jest tworzony na dwa sposoby:
- analogowe;
- cyfrowych.
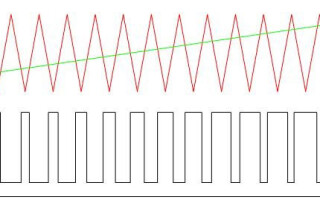
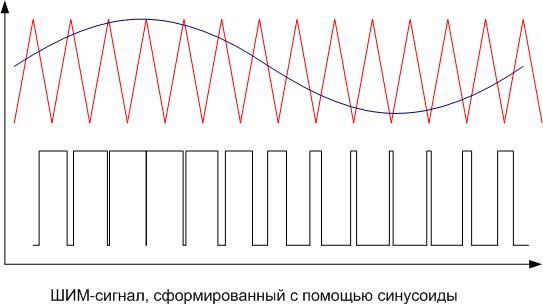
W analogowej metodzie generacji PWM sygnał nośny w postaci fali piłokształtnej lub trójkątnej jest doprowadzany do układu odwracającego. wejście komparatoraa sygnał informacyjny jest podawany na nieodwracające wejście komparatora. Jeśli chwilowy poziom nośnej jest wyższy od poziomu sygnału modulującego, wyjście komparatora wynosi zero, jeśli niższy - jeden. Wyjściem jest dyskretny sygnał o częstotliwości odpowiadającej częstotliwości nośnej trójkąta lub piłokształtnej i długości impulsu proporcjonalnej do poziomu napięcia modulującego.
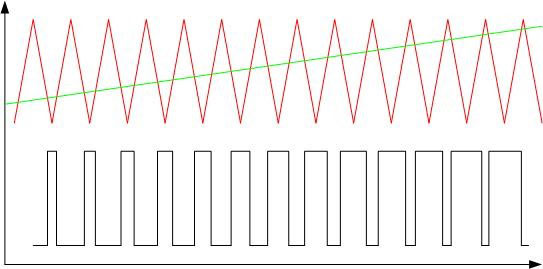
Jako przykład przedstawiono modulację szerokości impulsu sygnału trójkątnego za pomocą liniowego impulsu narastającego. Czas trwania impulsów wyjściowych jest proporcjonalny do poziomu sygnału wyjściowego.
Analogowe sterowniki PWM są również dostępne w postaci gotowych układów scalonych zawierających komparator i układ generowania nośnej. Wejścia służą do podłączenia zewnętrznych elementów przetwornika częstotliwości i sygnału informacyjnego. Wyjście to służy do sterowania zewnętrznymi przełącznikami o dużej mocy. Istnieją również wejścia sprzężenia zwrotnego do utrzymywania ustawionych parametrów sterowania. Tak jest na przykład w przypadku układu scalonego TL494. Sterowniki PWM z wewnętrznymi przełącznikami są dostępne dla zastosowań o stosunkowo niewielkiej mocy odbiorników. Wewnętrzny przełącznik LM2596 jest przystosowany do pracy z prądami o natężeniu do 3 amperów.
Metoda cyfrowa jest realizowana przy użyciu specjalistycznych układów scalonych lub mikroprocesorów. Długość impulsu jest kontrolowana przez program wewnętrzny. Wiele mikrokontrolerów, w tym popularne PIC i AVR, ma wbudowany moduł do sprzętowej realizacji PWM. Aby uzyskać sygnał PWM, należy uaktywnić moduł i ustawić jego parametry pracy. Jeśli nie ma takiego modułu, PWM można ułożyć wyłącznie programowo, co nie jest trudne. Metoda ta daje więcej możliwości i zapewnia większą swobodę dzięki elastycznemu wykorzystaniu wyjść, ale wymaga większych zasobów sterownika.
Charakterystyka sygnału PWM
Ważnymi cechami sygnału PWM są:
- amplituda (U);
- częstotliwość (f);
- Cykl pracy (S) lub współczynnik wypełnienia D.
Amplituda wyrażona w woltach jest ustawiana w zależności od obciążenia. Musi on zapewnić nominalne napięcie zasilania odbiornika.
Częstotliwość sygnału z modulacją szerokości impulsu wybiera się na podstawie poniższych rozważań:
- Im wyższa częstotliwość, tym większa dokładność regulacji.
- Częstotliwość nie może być mniejsza niż czas reakcji urządzenia sterowanego za pomocą PWM, w przeciwnym razie wystąpi zauważalne tętnienie sterowanego parametru.
- Im wyższa częstotliwość, tym większe straty przy przełączaniu. Wynika to z faktu, że czas przełączania klucza jest skończony. W stanie zatrzaśnięcia całe napięcie zasilania pada na element kluczowy, ale nie płynie przez niego prawie żaden prąd. W stanie otwartym przez klucz płynie prąd pełnego obciążenia, ale spadek napięcia jest niewielki, ponieważ rezystancja przejścia wynosi kilka omów. W obu przypadkach rozpraszanie mocy jest pomijalnie małe. Przejście z jednego stanu do drugiego jest szybkie, ale nie natychmiastowe. Podczas procesu otwierania-zamykania na częściowo otwartym elemencie spada wysokie napięcie i jednocześnie przez element przepływa znaczny prąd. W tym czasie rozpraszanie mocy osiąga duże wartości. Okres ten jest krótki i klucz nie ma czasu na znaczne rozgrzanie się. Jednak wraz ze wzrostem częstotliwości w jednostce czasu pojawia się więcej takich przedziałów czasowych, a straty ciepła wzrastają. Dlatego ważne jest, aby w konstrukcji kluczy stosować elementy szybko działające.
- Podczas sterowania silniki częstotliwość musi być wyprowadzona poza zakres częstotliwości czytelnych dla człowieka - 25kHz i więcej. Dzieje się tak dlatego, że niższa częstotliwość przełączania powoduje nieprzyjemny, gwiżdżący dźwięk.
Wymagania te są często sprzeczne ze sobą, dlatego wybór częstotliwości jest w niektórych przypadkach kompromisem.
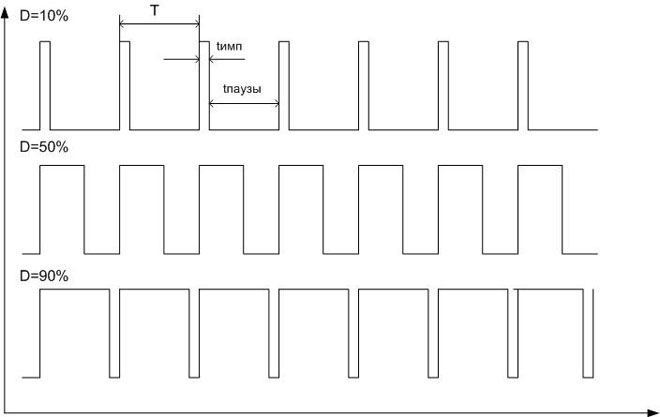
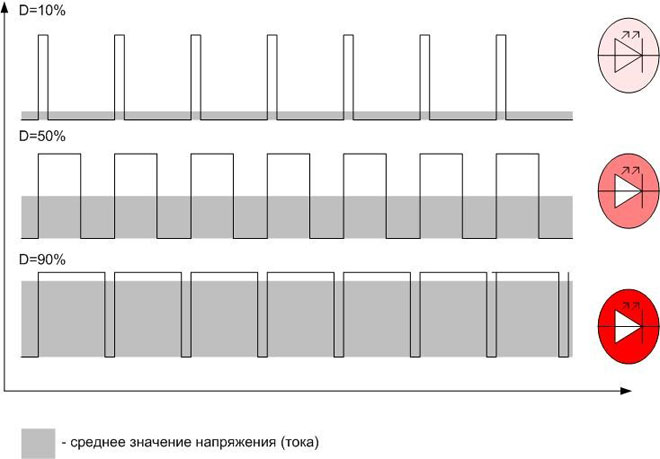
Wartość modulacji jest określana przez cykl pracy. Ponieważ częstotliwość powtarzania impulsów jest stała, stały jest również czas trwania okresu (T=1/f). Okres składa się z impulsu i pauzy, których czas trwania wynosi timp i tpauza, gdzie timp+tpauza=Т. Współczynnik to stosunek czasu trwania impulsu do okresu - S=timp/T. Jednak w praktyce okazało się, że wygodniej jest stosować wartość odwrotną - współczynnik wypełnienia: D=1/S=T/timp.. Jeszcze wygodniej jest wyrazić współczynnik wypełnienia jako wartość procentową.
Jaka jest różnica między PWM a PWM
W zagranicznej literaturze technicznej nie ma rozróżnienia między modulacją szerokości impulsu a sterowaniem szerokością impulsu (PWM). Rosyjscy eksperci starają się rozróżnić te pojęcia. W rzeczywistości PWM jest rodzajem modulacji, czyli zmiany sygnału nośnego pod wpływem innego, modulującego sygnału. Sygnał nośny pełni rolę nośnika informacji, a sygnał modulujący ustawia tę informację. Natomiast sterowanie szerokością impulsu to regulacja trybu obciążenia za pomocą PWM.
Przyczyny i zastosowania PWM
Zasada modulacji szerokości impulsu jest stosowana w Regulacja prędkości obrotowej silników indukcyjnych dużej mocy. W tym przypadku sygnał o regulowanej częstotliwości modulacji (jednofazowy lub trójfazowy) jest generowany za pomocą generatora sinusoidalnego małej mocy i nakładany na nośną w sposób analogowy. Wyjściem jest sygnał PWM, który jest podawany do kluczy zapotrzebowania na moc. Otrzymaną sekwencję impulsów można następnie przepuścić przez filtr dolnoprzepustowy, np. prosty łańcuch RC, i wyodrębnić oryginalną falę sinusoidalną. Można też obejść się bez niego - filtrowanie będzie zachodzić w sposób naturalny ze względu na bezwładność silnika. Oczywiście, im wyższa częstotliwość nośna, tym bardziej przebieg wyjściowy jest zbliżony do sinusoidy.
Pojawia się naturalne pytanie - dlaczego sygnał z oscylatora nie może być wzmacniany jednocześnie, np, z wykorzystaniem tranzystorów dużej mocy? Ponieważ element regulacyjny, działający w trybie liniowym, będzie dokonywał redystrybucji mocy między obciążeniem a przełącznikiem. Spowoduje to zmarnowanie dużej ilości energii na kluczowym elemencie. Z drugiej strony, jeśli w trybie kluczowym działa element regulacyjny o dużej mocy (trinistor, triak, tranzystor RGBT), moc jest rozłożona w czasie. Straty będą znacznie niższe, a sprawność znacznie wyższa.
W technice cyfrowej nie ma szczególnej alternatywy dla regulacji szerokości impulsu. Amplituda sygnału jest tam stała, a napięcie i prąd można zmieniać tylko poprzez modulację szerokości impulsu nośnego, a następnie jego uśrednianie. Dlatego PWM jest stosowany do sterowania napięciem i prądem w aplikacjach, w których można uśrednić sygnał impulsowy. Uśrednianie można realizować na różne sposoby:
- Dzięki bezwładności ładunku. Na przykład bezwładność cieplna grzałek termoelektrycznych i lamp żarowych sprawia, że regulowane obiekty nie ulegają znacznemu ochłodzeniu w przerwach między impulsami.
- Ze względu na bezwładność percepcji. Dioda LED świeci od impulsu do impulsu, ale ludzkie oko tego nie zauważa i odbiera to jako ciągłe świecenie o różnym natężeniu. Zasada ta jest wykorzystywana do sterowania jasnością punktów LED. Jednak kilkaset herców niezauważalnego migania jest nadal obecne i powoduje zmęczenie oczu.
- Ze względu na bezwładność mechaniczną. Ta właściwość jest wykorzystywana w sterowaniu silnikiem kolektorowym prądu stałego. Przy odpowiedniej częstotliwości sterowania silnik nie ma czasu na zgaśnięcie w przerwach czasu martwego.
Dlatego PWM stosuje się tam, gdzie decydującą rolę odgrywa średnia wartość napięcia lub prądu. Poza wymienionymi powyżej typowymi przypadkami, metoda PWM reguluje średni prąd w spawarkach, ładowarkach akumulatorów itp.
Jeśli naturalne uśrednianie nie jest możliwe, w wielu przypadkach rolę tę może pełnić wspomniany już filtr dolnoprzepustowy (LPF) w postaci łańcucha RC. Dla celów praktycznych jest to wystarczające, ale należy pamiętać, że nie jest możliwe oddzielenie oryginalnego sygnału od PWM za pomocą LPF bez zniekształceń. Widmo PWM zawiera przecież nieskończenie wiele harmonicznych, które nieuchronnie znajdą się w paśmie filtru. Nie należy więc mieć złudzeń co do kształtu zrekonstruowanej sinusoidy.
Sterowanie PWM diodami LED RGB jest bardzo skuteczne i wydajne. Urządzenie to ma trzy złącza p-n - czerwone, niebieskie i zielone. Zmieniając jasność każdego kanału osobno, można uzyskać niemal dowolny kolor diod LED (z wyjątkiem czystej bieli). Możliwości tworzenia efektów świetlnych za pomocą PWM są nieograniczone.
Najczęstszym zastosowaniem sygnału cyfrowego z modulacją PWM jest sterowanie średnim prądem lub napięciem przepływającym przez obciążenie. Jednak ten rodzaj modulacji można również wykorzystać w niekonwencjonalny sposób. Wszystko zależy od wyobraźni projektanta.
Powiązane artykuły: